Ice binds workpieces
2023-06-28 Different materials do not simply stick together. This is important for industrial production, and Leuphana research is developing a tool for this purpose.



By Felix van Rossum, Benedikt Haus, Alexandra Mironova, Andreas Zedler, Harald Aschemann and Paolo Mercorelli
The connection between a tool and workpiece, the material to be processed, is complex. Due to the high quality requirements, the necessary clamping devices play an important role in industrial machining processes. In particular, thin-walled and fragile parts in micro-manufacturing, but also freely and irregularly shaped workpieces in macro-manufacturing are difficult to clamp. To overcome these challenges, an innovative phase-changing and adhesive clamping technique is being investigated in a research project at Leuphana University Lüneburg in cooperation with the University of Rostock: clamping with ice. This is a contribution to sustainable production technology.
Clamping by means of adhesive forces - that is, the adhesion of different bodies to each other - brings frozen water into play. Based on electrothermal transducers, so-called Peltier elements, it represents a sustainable and flexible clamping technology and enables almost deformation-free clamping. This even applies to workpieces that are fundamentally difficult to clamp. This advanced approach is the basis for a new type of milling process.
Adhesive force of the ice holds out
Research on this still has a long way to go. The project is specifically geared to the industrial requirements of conventional machining processes. One important conclusion already reached in experiments is that the adhesive force of the ice develops sufficiently high clamping forces to securely clamp workpieces and withstand the process forces exerted on the workpiece during machining.
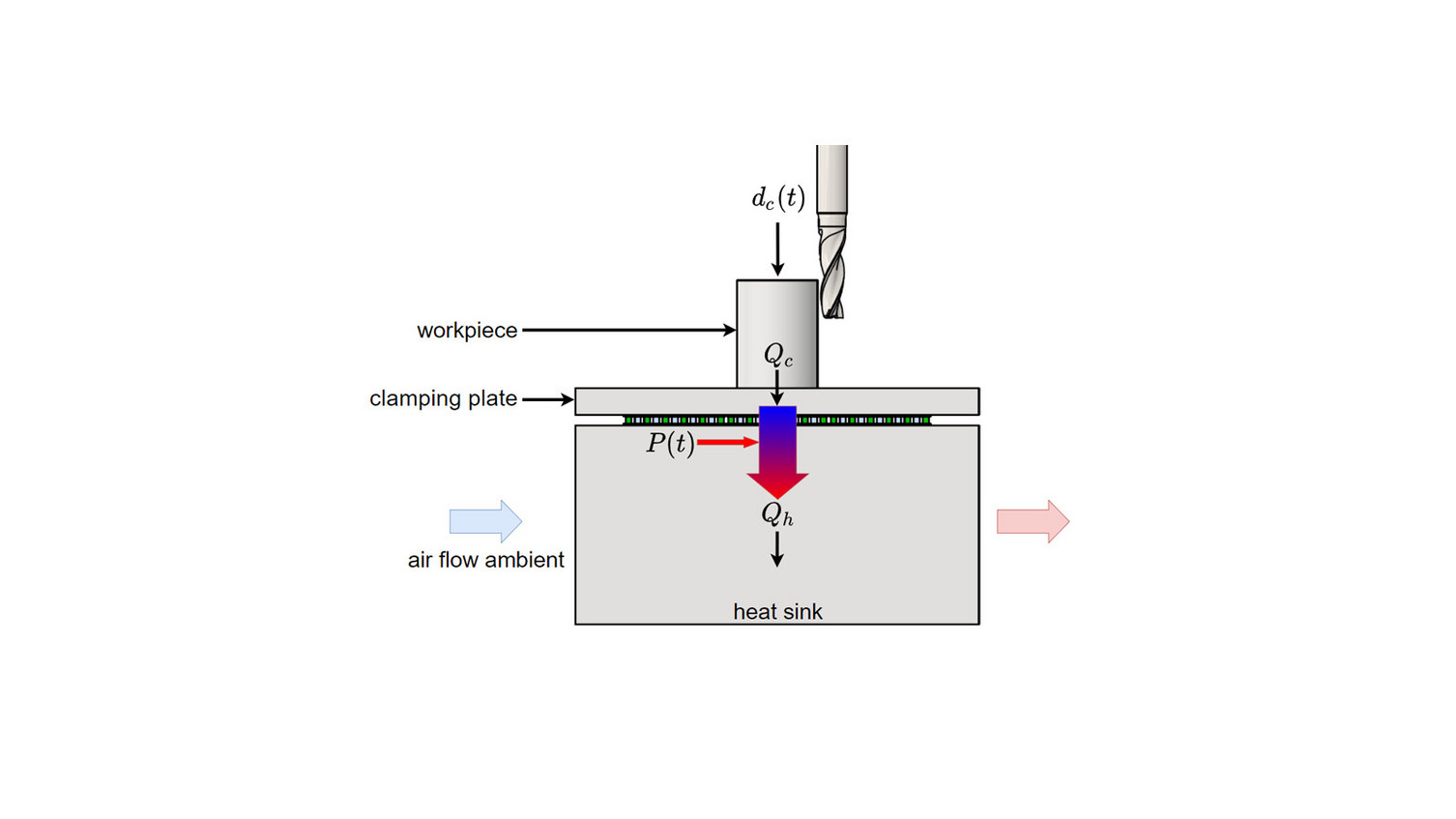
Deepening: The heat generated in the process represents the main risk to process reliability. This requirement is addressed by deriving a robust sliding mode-based control law (see Sources 1 and 2) that is insensitive to model and parameter uncertainties: it is also stable with respect to thermal disturbances. This has been proven by simulations and measurements. The control law is based on a mathematical model description and a formula derivation of the relevant physical effects.
Based on the results obtained, a prototype of an embedded control system and an optimised clamping device is designed and manufactured. A distributed control optimisation is pursued here, as well as a sensorless state estimation (see 3): This proves that the control improves the performance of the ice clamping in terms of a more accurate and homogeneous cooling - thus a safer clamping more suitable for industrial applications. In the future, this innovative process would make it possible to integrate ice voltage into the framework of Industry 4.0 (source 4).
Sources
[1] Felix van Rossum, Benedikt Haus, Paolo Mercorelli, and Andreas Zedler. Cascaded kalman filters for a sliding mode control in a peltier structure for an innovative manufacturing system. In IECON 2021 – 47th Annual Conference of the IEEE Industrial Electronics
Society, pages 1–6, 2021.
[2] Mironova A., Mercorelli P. and Zedler A., “A Multi Input Sliding Mode Control for Peltier Cells using a Cold-Warm Sliding Surface”, Journal of Franklin Institute (Elsevier Publishers), vol. 355, no. 18, pp. 9351-9373, 2018.
[3] Alexandra Mironova, Benedikt Haus, Andreas Zedler, and Paolo Mercorelli. Extended kalman filter for temperature estimation and control of peltier cells in a novel industrial milling process. IEEE Transactions on Industry Applications, 56(2):1670–1678, March 2020.
[4] Paolo Mercorelli et al., Modeling, Identification, and Control for Cyber- Physical Systems Towards Industry 4.0, Elsevier Publisher, ISBN: 9780323952071, Buch im Druck, 2023.
Contact
F. van Rossum, B. Haus, A. Mironova, A. Zedler and P. Mercorelli work at the Institute of Production Engineering and Systems at Leuphana University of Lüneburg; H. Aschemann is a researcher at the Chair of Mechatronics at the University of Rostock.
Leuphana University Lüneburg
Institute for production technology and systems
Faculty Management and Technology
Universitätsallee 1
21335 Lüneburg